Vos prieš dvejus metus mažytis robotas manta spindulėlis tapo greičiausiai pasaulyje plaukiančiu minkštakūniu robotu. Na, vienas iš jo palikuonių dabar sumušė tą rekordą – ir naudoja mažiau energijos nei jo pirmtakas.
Originalų 22,8 mm ilgio robotą suprojektavo doc. Jie Yin ir kolegos iš Šiaurės Karolinos valstijos universiteto.
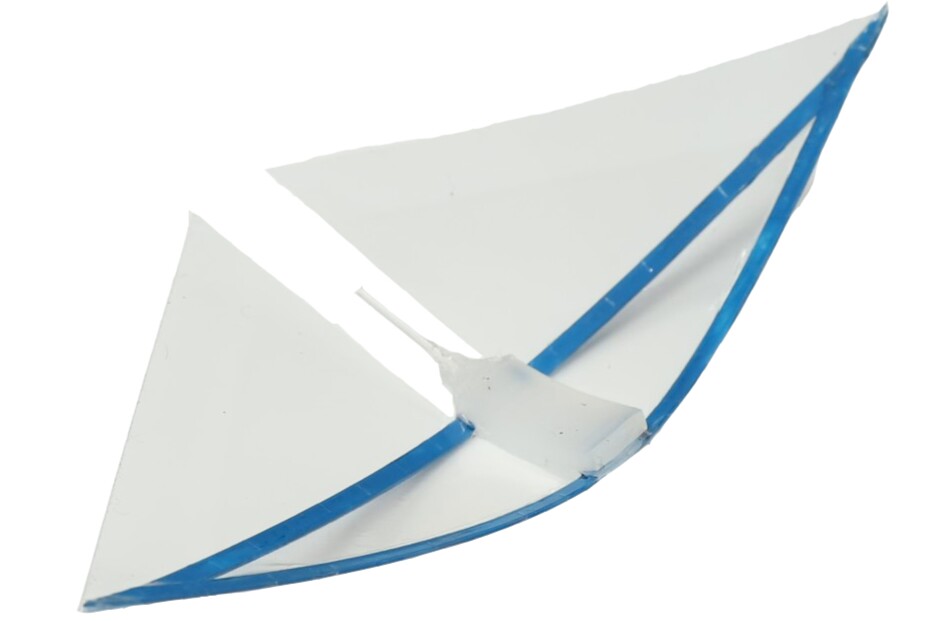
Jame buvo du lankstūs, į manta spindulius panašūs poliesterio sparnai, kurie iš tikrųjų buvo vienos lenktos bistabilios konstrukcijos kairysis ir dešinysis galai. Bistabilumas reiškia įtemptos struktūros gebėjimą išlikti vienoje iš dviejų padėčių, nereikalaujant energijos – plaukų segtukas yra geras bistabilios struktūros pavyzdys.
Šiaurės Karolinos valstijos universitetas
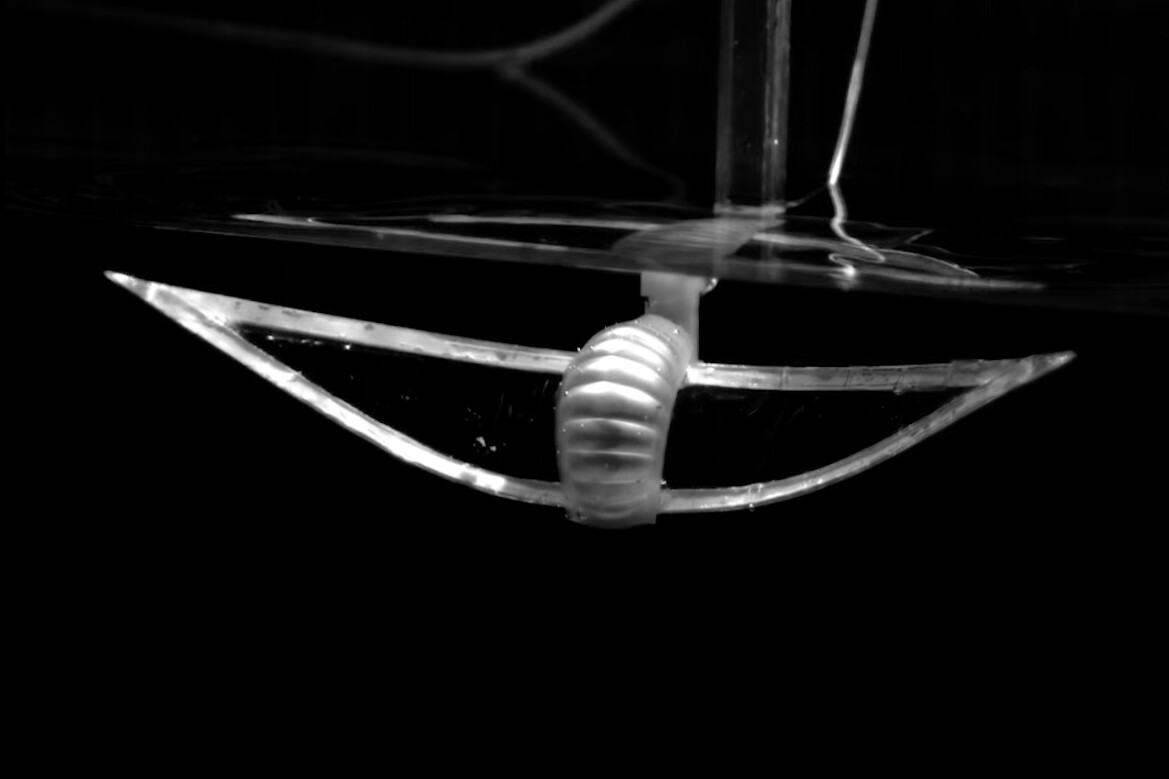
Roboto bistabilios sparno konstrukcijos vidurys buvo įterptas tarp viršutinės ir apatinės minkštos silikoninės pneumatinės pavaros.
Kai oras buvo pumpuojamas į viršutinę pavarą, jis užsilenkė aukštyn ir patraukė į viršų sparno konstrukcijos vidurį, todėl jis „užsifiksavo“ į padėtį, kuri patraukė du sparnus žemyn. Kai viršutinė pavara buvo išleista orą ir apačioje vienas buvo pripūstas, konstrukcija nutrūko priešinga kryptimi, o sparnai vėl pakilo. Mechanizmas parodytas kitame vaizdo įraše.
Į drugelio smūgį panašus minkštas plaukikas robotas, kuris yra greitas ir efektyvus
Tokiu būdu įjungus dvi pavaras pirmyn ir atgal (per išorinį oro siurblį), buvo galima pakankamai greitai išskleisti sparnus, kad vidutinis plaukimo greitis būtų 3,74 kūno ilgio per sekundę. Pasak mokslininkų, tai buvo maždaug keturis kartus greičiau nei anksčiau buvo įmanoma minkšto kūno plaukimo robotams.
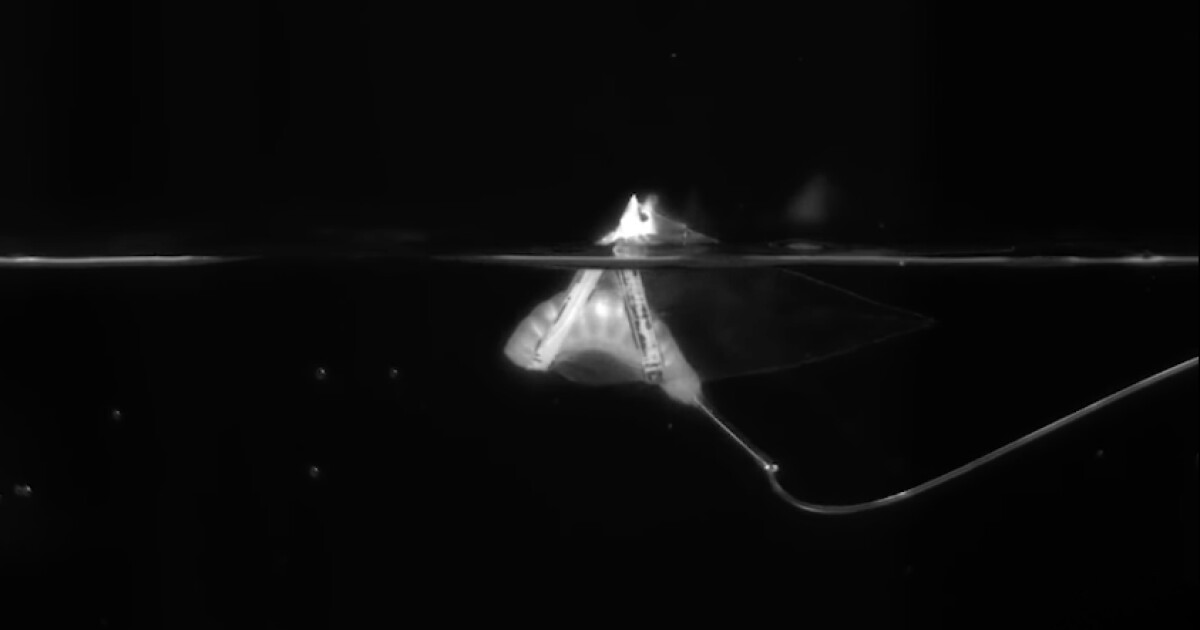
68 mm ilgio naujas robo-manta, Yin ir jo komanda atsisakė bistabilios konstrukcijos kartu su apatine pavara. Lanksti sparno konstrukcija dabar yra monostabili, tai reiškia, kad ji visada grįš į vieną padėtį – išlenktą žemyn viduryje su sparnais aukštyn – kai nebus naudojama energija.
Haitao Čing, NC valstybinis universitetas
Pripučiama viena viršutinė pneumatinė pavara susisuka žemyn ir traukia žemyn sparno konstrukcijos vidurį, todėl sparnai spragteli žemyn. Tačiau, kai tik pavarai leidžiama išleisti orą, dėl elastingos konstrukcijos atkūrimo jėgos ji vėl užsifiksuoja į numatytąją padėtį, patraukdama sparnus aukštyn.
Taigi, nors originalus robotas turėjo skirti laiko ir energijos, kad pakaitomis pripūstų / išleistų dvi pavaras per sparnų plakimo aukštyn ir žemyn ciklą, naujasis robotas turi suaktyvinti tik vieną. Šis patobulinimas suteikia robotui vidutinį 6,8 kūno ilgio per sekundę plaukimo greitį ir sunaudoja 1,6 karto mažiau energijos nei originalas.
Haitao Čing, NC valstybinis universitetas
Be to, naujasis dizainas leidžia robotui judėti vertikaliai vandens stulpelyje, tiesiog keičiant plaukimo greitį.
„Kai roboto pelekai yra ramybės būsenoje, oro kamera yra tuščia, todėl sumažėja roboto plūdrumas. O kai robotas lėtai plasnoja pelekais, pelekai ilsisi dažniau”, – sako doktorantas Haitao Qing, pirmasis tyrimo autorius. . „Kitaip tariant, kuo greičiau robotas plevėsuoja pelekais, tuo daugiau laiko prisipildo oro kamera, todėl ji plūduriuoja.
Mokslininkai šiuo metu dirba ties roboto šoninio valdymo metodu, atsižvelgdami į būsimas programas, tokias kaip vandenynų tyrinėjimas ir vandens laukinės gamtos stebėjimas. Veiksmą galite pamatyti toliau pateiktame vaizdo įraše.
Straipsnis apie tyrimą neseniai buvo paskelbtas žurnale Mokslo pažanga.
Manta spindulių įkvėpti greiti ir manevringi minkšti plaukimo robotai
Šaltinis: Šiaurės Karolinos valstijos universitetas