
Proveržis, kuris visai nėra baisus, mokslininkai sukūrė metodą, kaip pritvirtinti gyvą žmogaus odą prie robotų veidų. Ši technologija iš tikrųjų gali turėti keletą vertingų pritaikymų, be kūrimo Vakarų pasaulis– kaip scenarijus yra realybė.
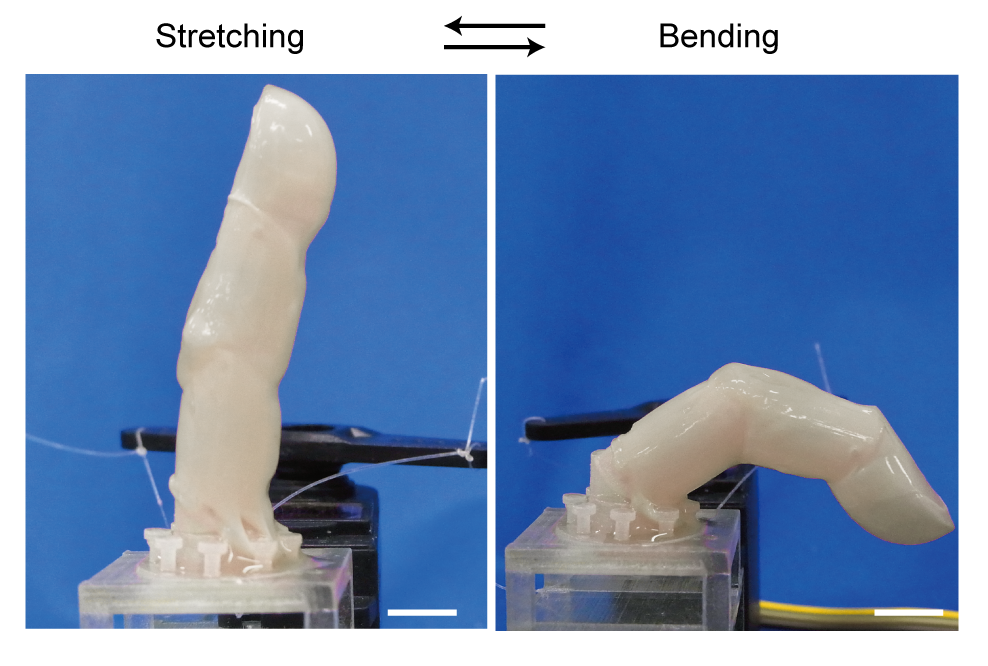
Prieš dvejus metus Tokijo universiteto prof. Shoji Takeuchi ir kolegos sėkmingai motorizuotą roboto pirštą uždengė bioinžinerijos būdu sukurta oda pagamintas iš gyvų žmogaus ląstelių.
Buvo tikimasi, kad šis koncepcijos įrodymo pratimas gali atverti kelią ne tik realesniems „Android“ tipo robotams, bet ir robotams su savaime gyjančiais, lietimui jautriais dangalais. Technologija papildomai galėtų būti naudojama kosmetikos testavimui, plastikos chirurgų mokymui.
© Takeuchi ir kt., 2022 m.
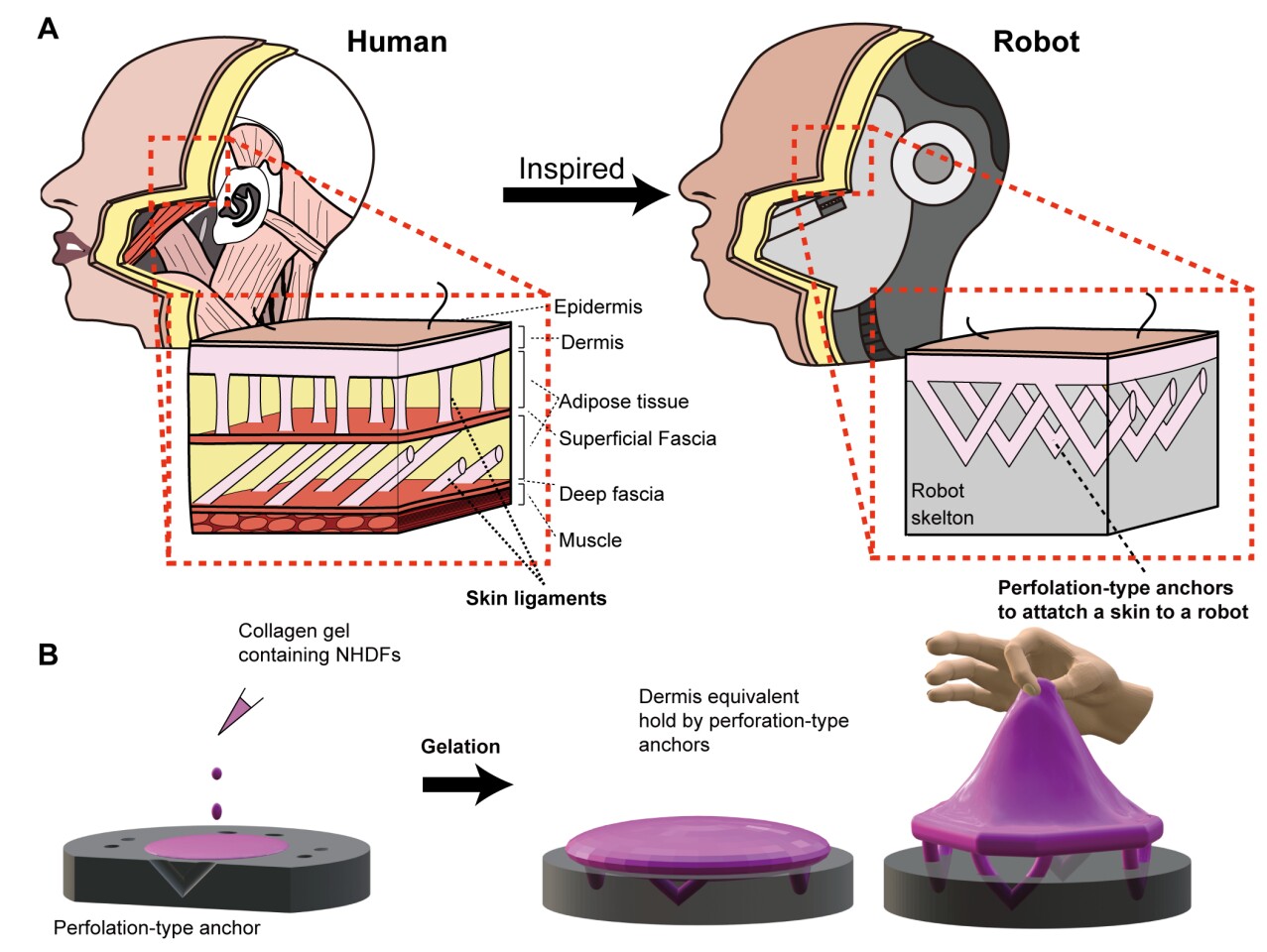
Nors oda dengtas pirštas tikrai buvo įspūdingas pasiekimas, oda niekaip nebuvo sujungta su apatiniu skaitmeniu – iš esmės tai buvo susitraukiantis, kad tilptų pirštą gaubiantis apvalkalas. Priešingai, natūrali žmogaus veido oda yra sujungta su apatiniu raumenų audiniu raiščiais, sudarytais iš jungiamojo audinio.
Be kita ko, šis išdėstymas leidžia mums eksponuoti įvairias veido išraiškas. Be to, judant kartu su apatiniame audinyje, oda netrukdo veido judesiams susiglausti. Dėl tos pačios priežasties taip pat mažesnė tikimybė, kad jis bus pažeistas, jei jis užsikimštų ant išorinių objektų.
Mokslininkai anksčiau bandė sujungti bioinžinerijos būdu sukurtą odą su sintetiniais paviršiais, paprastai per mažus inkarus, kurie išsikiša į viršų. iš tie paviršiai. Šie smulkūs inkarai pablogina odos išvaizdą, tačiau neleidžia jai atrodyti lygiai. Jie taip pat neveikia gerai ant įgaubtų paviršių, kur jie visi nukreipti į vidurį.
Atsižvelgdami į tokius apribojimus, Takeuchi ir jo komanda neseniai sukūrė naują odos tvirtinimo sistemą, pagrįstą mažytėmis V formos perforacijomis, padarytomis sintetiniame paviršiuje.
© Takeuchi ir kt., 2024 m. CC-BY-ND
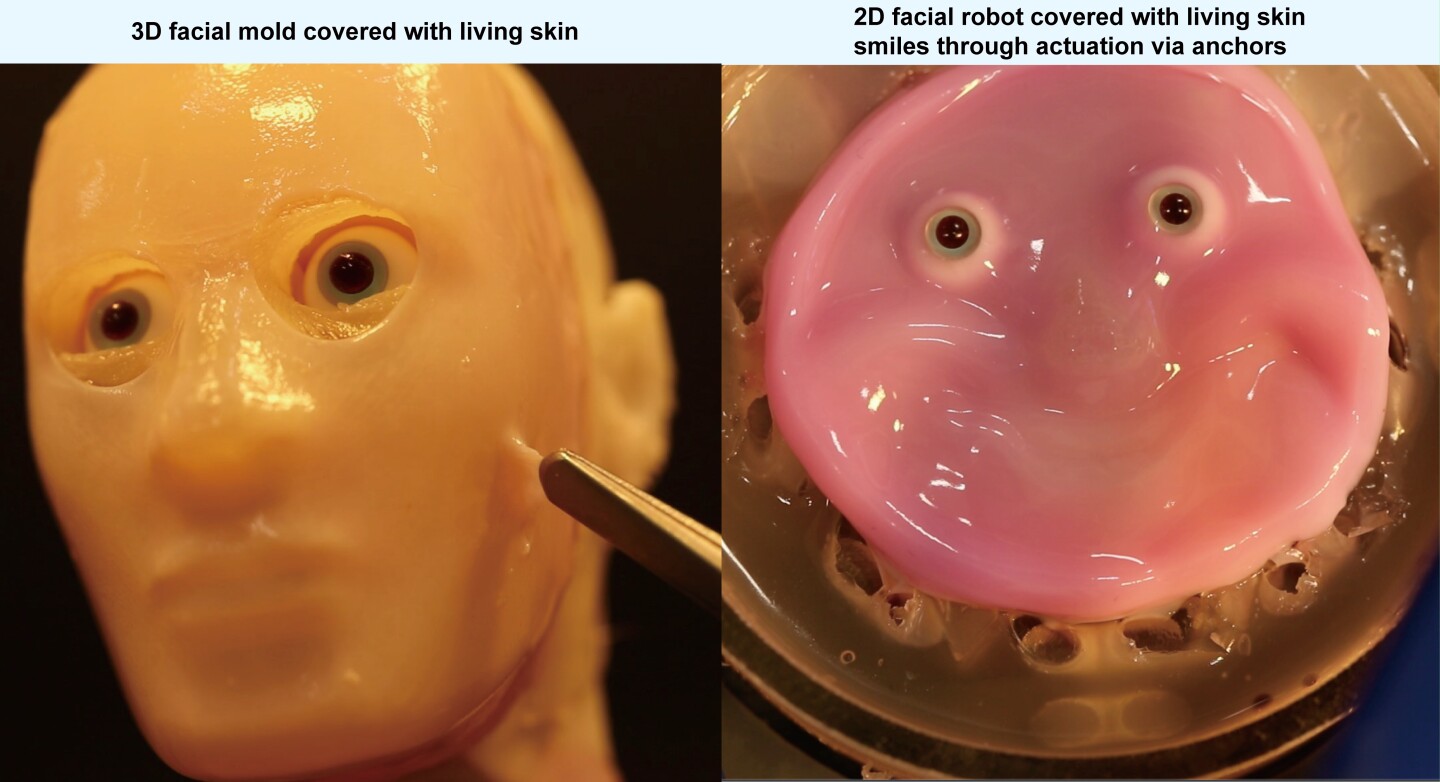
Mokslininkai sukūrė žmogaus veido formą, kurioje buvo daugybė šių perforacijų, o vėliau tą formą padengė geliu, sudarytu iš kolageno ir žmogaus odos fibroblastų. Pastarosios yra ląstelės, atsakingos už jungiamojo audinio gamybą odoje.
Dalis gelio nutekėjo žemyn į perforacijas, o likusi dalis liko pelėsio paviršiuje. Po septynių dienų kultivavimo gelis susidarė į žmogaus odos dangą, kuri per audinį per audinį buvo saugiai pritvirtinta prie pelėsio.
Antrajame eksperimente silikoninės gumos substrate buvo padarytos perforacijos, ant kurių vėliau buvo užteptas gelis ir leista kultivuoti. Galutinis rezultatas buvo supaprastintas žmogaus odos veidas, kurį buvo galima priversti nusišypsoti pajudinus du su pagrindu sujungtus strypus.
© Takeuchi ir kt., 2024 m. CC-BY-ND
Nereikia nė sakyti, kad dar reikia šiek tiek padirbėti, kad technologija būtų panaudota tikrai tikroviškuose robotuose.
„Manome, kad storesnę ir tikroviškesnę odą galima pasiekti įtraukiant prakaito liaukas, riebalines liaukas, poras, kraujagysles, riebalus ir nervus“, – sako Takeuchi. „Žinoma, judėjimas taip pat yra labai svarbus veiksnys, ne tik medžiaga, todėl kitas svarbus iššūkis yra sukurti žmogišką išraišką integruojant sudėtingas pavaras arba raumenis roboto viduje.
Straipsnis apie tyrimą neseniai buvo paskelbtas žurnale Ląstelių ataskaitos, fiziniai mokslai.
Šaltinis: Tokijo universitetas