Žemės ūkis yra viena iš pramonės šakų, kuriai vis labiau kenkia robotika, o tai visiškai prasminga, nes ūkininkai visame pasaulyje susiduria su žmonių darbo jėgos trūkumu ir didėjančiomis darbo sąnaudomis. Kai kurių kultūrų atveju darbo jėga sudaro beveik 50% gamybos išlaidų.
Be to, vaisių ir daržovių derliaus nuėmimas yra ypač sudėtingas, nes kai kurie augalai, pavyzdžiui, braškės, avietės ir avokadai, turi labai trumpą derliaus nuėmimo laikotarpį ir lengvai susižeidžia. Dėl to ūkininkai dažnai netenka iki 25 % pasėlių. Vakarų Virdžinijos universiteto (WVU) mokslininkai sukūrė minkštą robotų ranką, kuri galėtų išspręsti daugumą šių problemų, efektyviai nuimdama gležnus vaisius ir sumažindama atliekų kiekį.
Anandas Kumaras Mišra
Žemės ūkio robotai egzistuoja jau kurį laiką, tačiau dauguma jų yra gana standūs ir stambūs, turi tvirtą rankeną ir neturi lytėjimo jutiklių. Jie puikiai renka obuolius ar citrusinius vaisius, bet kovoja su subtilesniais produktais.
WVU tyrimų grupė vadinama Robiotics Lab, o jos nariai daugiausia dėmesio skiria robotų, imituojančių gyvūnų judėjimą, kūrimui. Roboto ranka, kurią jie dirbo, nėra tokia standi metalinė letena, kurią galėtume įsivaizduoti galvodami apie robotus. Jis semiasi įkvėpimo iš jūros žvaigždžių, o pirštai yra minkšti iš silikono ir poliuretano. Prietaisas vis dar šiek tiek primena žmogaus ranką su penkiais lanksčiais pirštais, skirtais švelniai skinti vaisius.

Anandas Kumaras Mišra
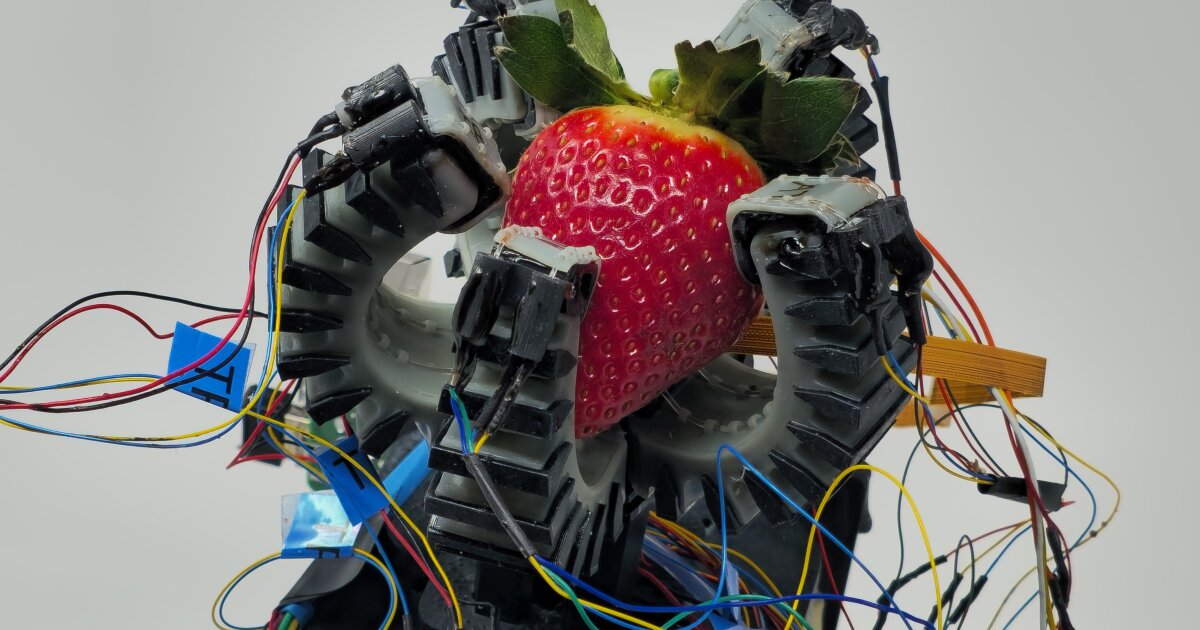
Naujojoje robotinėje rankoje sumontuota miniatiūrinė kamera, galinti įvertinti vaisių sunokimą, ką jau matėme kai kuriuose žemės ūkio robotuose. Šios technologijos problema yra ta, kad vizualinis patikrinimas ne visada yra tikslus. Apie tam tikrų vaisių, pavyzdžiui, avokadų, brandą sunku įvertinti vizualiai, todėl žmonės dažniausiai juos švelniai spaudžia. Šis metodas yra gana patikimas ir paprastas, tačiau išmokyti tai daryti robotą buvo vienas iš pagrindinių mokslininkų iššūkių.
Dėl to robotų pirštai yra ne tik minkšti ir lankstūs, bet ir turi specialius jutiklius, kurie gali įvertinti vaisių sunokimą liečiant. Šie jutikliai leidžia robotui išspausti vaisius tiek, kad būtų nustatytas jo tvirtumas, jo nesmulkindamas. Dar viena naudinga funkcija – jutikliai gali nustatyti, ar rankena pakankamai tvirta, o jei ne, reguliuoti slėgį, kad vaisius nenukristų.
Bandymai buvo sėkmingi ir taip pat parodė, kad roboto rankos jutikliai gali nuspėti vaisiaus formą beveik 100% tikslumu. Dabartinis prototipas sveria kiek mažiau nei 65 gramus (2,29 uncijos), atsidaro ir užsidaro greičiau nei per dvi sekundes ir gali pakelti objektus, sveriančius iki 1 kg (2,2 svaro).

Anandas Kumaras Mišra
Artimiausiu metu tyrėjų komanda su šia technologija planuoja patekti į pasaulinę rinką.
„Komerciniam naudojimui šiuo metu kuriame labiau keičiamo dydžio griebtuvo versiją, kad per ateinančius dvejus ar ketverius metus būtų galima naudoti lauke“, – sako pagrindinis mokslininkas Anandas Mishra, WVU Mechanikos, medžiagų ir aviacijos inžinerijos katedros docentas.
Tyrėjai taip pat tikisi, kad robotų ranka bus pritaikyta ne tik žemės ūkyje. Panašios minkštos robotų sistemos galėtų būti naudojamos kosminėse misijose, povandeniniuose tyrinėjimuose ir sveikatos priežiūrai.
Straipsnis apie tyrimą neseniai buvo paskelbtas žurnale Gamtos komunikacijos.
Šaltinis: Vakarų Virdžinijos universitetas
Nuoroda į informacijos šaltinį