
Johns Hopkins universiteto tyrėjai sugalvojo geresnę protezavimo ranką, kuri naudoja hibridinį dizainą, kad kruopščiai sugriebtų įvairius objektus, turinčius reikiamą spaudimą.
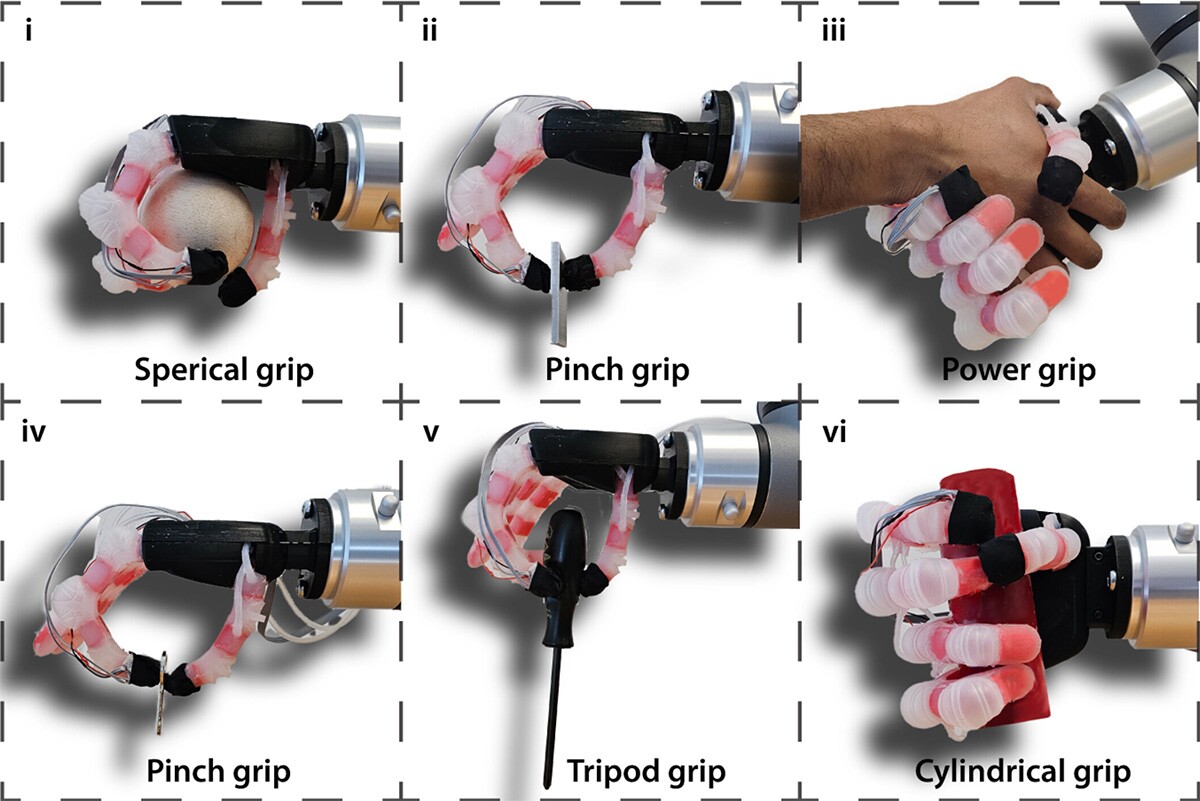
Robotinis priedas sujungia standžius ir minkštus komponentus, kad imituotų natūralią žmogaus rankos struktūrą, taip pat daugybę jutiklių ir sistemos, skirtos pateikti grįžtamąjį ryšį vartotojo nervams. Eksperimentuose jis sėkmingai pasiėmė ir manipuliavo 15 skirtingų objektų, įskaitant subtilius įdarytus žaislus, kartonines dėžutes, ananasus, metalinius vandens butelius ir net neryškų plastikinį puodelį, užpildytą vandeniu – nepažeisdami ir nesugadinant jų.
„Mes norime suteikti žmonėms, turintiems aukštesniąją galūnę, prarasti galimybę saugiai ir laisvai bendrauti su savo aplinka, jausti ir laikyti savo artimuosius, nesirūpindami juos įskaudinti“,-aiškino Sriramana Sankar, biomedicinos inžinerijos doktorantas, vadovavęs tyrimų projektui. Sankar šias išvadas pristatė savo pirmajame autoriaus dokumente, kuris pasirodė Mokslo pažanga šią savaitę.
Bioninės rankos sugriebia kaip žmogus
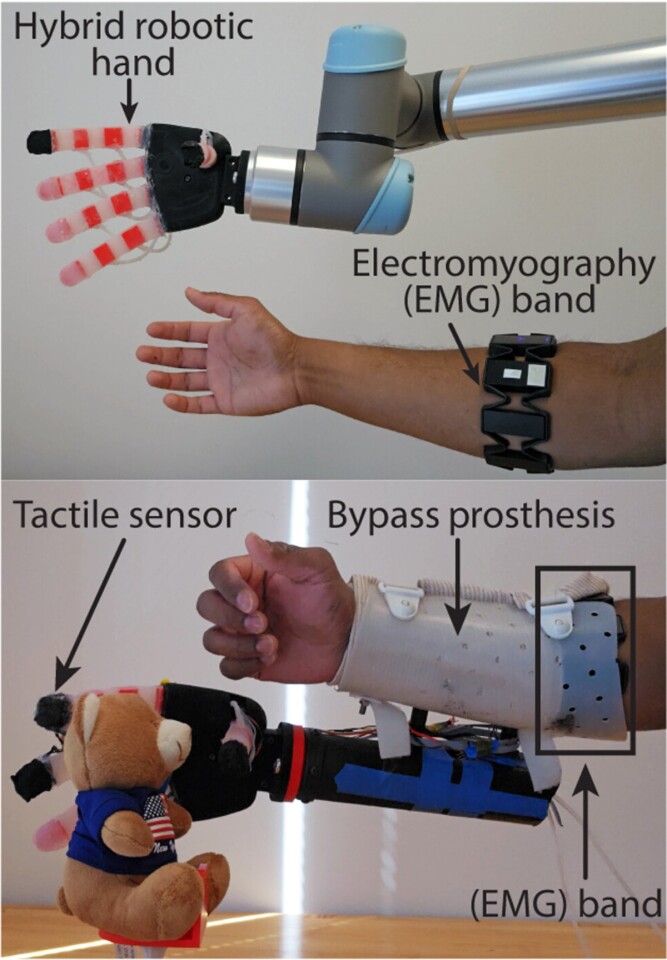
Protezinis prietaisas labai primena žmogaus ranką, su penkiais artikuliuojančiais pirštais, pagamintais naudojant minkštų guminių tipo polimerus, ir standų 3D atspausdintą skeletą. Trys biologiškai įkvėptų taktilinių jutiklių sluoksniai leidžia tinkamai sugriebti ir atskirti įvairius objektus. Pirštai turi oro užpildytus sąnarius, kuriuos galima valdyti dilbio raumenimis.
„Jutiminė informacija iš pirštų yra išverčiama į nervų kalbą, kad būtų užtikrinta natūralistinis jutimo grįžtamasis ryšys per elektrinės nervo stimuliaciją“, – teigė Sankar. Tai dėka mašininio mokymosi algoritmų, kuriuose sutelkiami signalai iš jutiklių, kol jie nėra nukreipti į nervus vartotojo kūne – panašiai kaip ir kiti protezai.
Šie signalai suriša smegenis ir nervus, leidžiančius rankai reaguoti į tai, ką ji liečia. Ši sistema įgalina intuityviau tinkamą robotų ranką, kuri yra gana panašesnė į tikrąjį dalyką, nei panašios pastangos, kurias matėme anksčiau.
Šiuo metu robotų ranka gali būti kontroliuojama naudojant EMG signalus, kuriuos tradiciškai naudoja žmonės, kurių viršutinės galūnės praranda mioelektrinių protezų rankų kontrolei. 150 USD vertės gestų-kontrolės įtaisas, vadinamas „Myo“ rankenos juosta, paima ir klasifikuoja EMG signalus, o rankos padėtys siunčiamos į „Arduino“ mikrovaldiklį, kad būtų galima atlikti robotinės rankos pneumatinį įjungimą.
„Jei laikote puodelį kavos, kaip jūs žinote, kad ketinate ją mesti?” sakė Nitish Thakor, kuris režisavo tyrimą. „Jūsų delnai ir pirštų galiukai siunčia signalus į jūsų smegenis, kad puodelis slenka. Mūsų sistema yra neurodoma-ji modeliuoja rankos jutiklinius receptorius, kad būtų gaminami nervų panašūs pranešimai, taigi protezavimas” „smegenys”, ar kompiuteris supranta, ar kažkas yra karšta, ar šalta, minkšta ar kieta, arba slenka nuo rankenos „.
Tai yra šiek tiek toliau nei ankstesnės pastangos, kurias matėme tobulinant protezą. Praėjusiais metais Italijos mokslininkai pristatė būdą aptikti objektų temperatūrą, su kuria liečiasi protezavimo ranka. Ir dar 2021 m. Bendras MIT ir Šanchajaus Jiao Tongo universiteto projektas pademonstravo protezą, kuris tiksliai išpūtė individualius pirštus, pagamintus iš minkšto elastomero, kad suvoktų objektus ir pateiktų lytėjimo atsiliepimus.
Ši nauja ranka galėtų atrakinti tikslesnius, natūraliai jaučiamus protezus amputualijoms-ir taip pat įgalinti didesnį mikroautobuso vitrinumą humanoidiniams robotams, kuriems pavesta tvarkyti subtilius daiktus aplink jūsų namus, ir surinkimo linijoje, kad būtų galima pastatyti daugiau botų.
Komanda toliau plėtos šį įrenginį, tyrinėdama stipresnes sukibimo jėgas, daugiau jutiklių ir aukštesnės kokybės medžiagų.
Šaltinis: Johns Hopkins universitetas