ANYmal keturkojis robotas ne tik vaikšto keturiomis kojomis, bet ir gali riedėti ant keturių ratų, atsistoti, mėtyti dėžes, lipti ir leistis laiptais. Lyg viso to būtų negana, dabar daiktas gali lipti ir kopėčiomis.
ETH Ciuricho tyrimų instituto inžinierių sukurtas ANYmal pirmą kartą atkreipė mūsų dėmesį dar 2017 m., kai sukūrė galimybę naudoti liftus daugiaaukščiuose pastatuose. Nuo tada jis tapo komerciškai prieinamas per ETH spinoff įmonę ANYbotics. Kitas startuolis parduoda ratuotą versiją, kuri dabar vadinama „Swiss-Mile“ robotu.
Dabartinio ANYmal modelio įprastas ėjimo greitis yra 0,75 m (2,46 pėdos) per sekundę ir vienu baterijos įkrovimu jis gali vaikščioti viduje arba lauke 90–120 minučių. Jame yra jutiklių, tokių kaip 360 laipsnių lidar modulis, šešios gylio jutimo kameros ir dvi optinės kameros, kurios visos perduoda duomenis į du Intel 6 branduolių procesorius.
ANYbotics
Visa ši technologija leidžia robotui savarankiškai atlikti tokias užduotis kaip saugos ir saugumo patikrinimai gamyklose, dujų gamyklose, sandėliuose ir net kasyklose. Dalis visų tų vietų pasiekiamos tik kopėčiomis, kuriomis ANYmal užlipti negali.
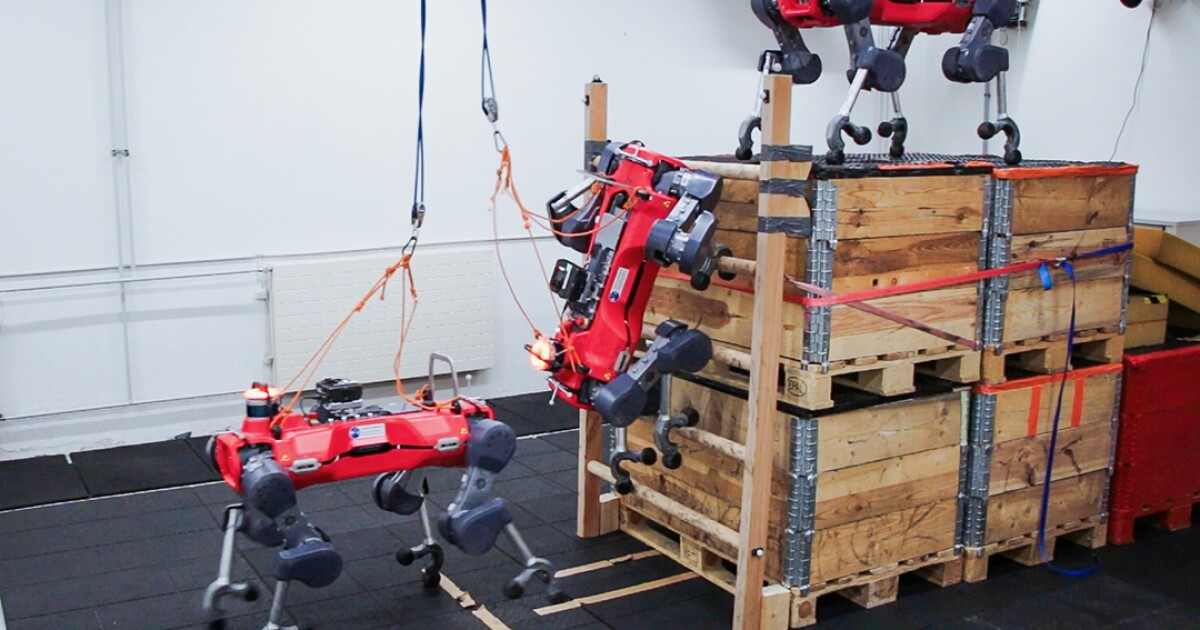
Siekdama pašalinti šį trūkumą, ETH Ciuricho robotų Dylano Vogelio ir Roberto Baineso vadovaujama komanda iškeitė ANYmal roboto kojas į keturis „užkabintus galinius įtaisus“. Šie C formos priedai leidžia botui taikyti ir gniuždymo, ir tempimo jėgą kopėčių laiptams. Tai reiškia, kad jis gali stumti žemyn ant žemesnių laiptelių ir tuo pat metu traukti aukštyn iki aukštesnių, taip stabilizuodamas kopėčių masės centrą jomis lipant.

ETH Ciurichas
Tačiau tie efektoriai nėra labai geri, jei robotas nežino, ką su jais daryti. Dėl šios priežasties mokslininkai naudojo tai, kas vadinama „privilegijuoto mokytojo ir studento mokymosi metodu“.
Labai paprastai kalbant, tai apima virtualaus mokytojo mokymą naudojant kompiuterinį modelį, kuriame visi kintamieji (pvz., kopėčių kampas ir atstumas tarp laiptelių) yra žinomi, taip pat moko virtualų mokinį, kuris imituoja mokytojo elgesį, naudodamas tik chaotišką „triukšmingumą“. “ jutiminė informacija.
Tas virtualus studentas – kuris žino ką daryti ačiū mokytojui ir kaip tai padaryti padaryti tai geriausiai dėl jutimo duomenų – vėliau įtraukiamas į programinę įrangą, kurią tikrasis fizinis robotas naudoja lipdamas kopėčiomis.
Naudojant šią programinę įrangą laboratoriniams tyrimams, modifikuoto ANYmal bendras sėkmės procentas pakilo kopėčiomis, kurių kampas svyravo nuo 70 iki 90 laipsnių. Be to, jis tomis kopėčiomis kopė 232 kartus greičiau nei bet kuris kitas kopėčiomis kopiantis robotas, dvikojis ar keturkojis.
Žemiau esančiame vaizdo įraše galite pamatyti, kaip robotas veikia.
Tvirtas laipiojimas kopėčiomis su keturkoju robotu
Šaltinis: ETH Zurich Robotic Systems Lab per IEEE spektrą