
Vis labiau tobulėjančios robotikos amžiuje viena komanda puikiai ir tikrai atsisakė šios tendencijos, o įkvėpimo smeigė mažo skraidančio vabzdžio smeigtuko galvutės dydžio smegenyse, kad sukurtų robotą, galintį sumaniai išvengti susidūrimų su labai mažai pastangų ir energijos sąnaudomis. .
Mažos vabzdžių smegenys yra mažai tikėtinas biomimikos šaltinis, tačiau Groningeno universiteto Nyderlanduose ir Bylefeldo universiteto Vokietijoje mokslininkai manė, kad tai yra ideali sistema, skirta robotų judėjimui. Vaisinės musės (Drosophila melanogaster) turi nepaprastai paprastus, bet veiksmingus navigacijos įgūdžius, naudoja labai mažai smegenų galių, kad greitai važiuotų nematomomis tiesiomis linijomis, o tada atitinkamai prisitaiko – skrenda į kairę arba į dešinę nukreipta linija, kad išvengtų kliūčių.
Turėdama tokias mažytes smegenis, vaisinė musė turi ribotus skaičiavimo išteklius skrydžio metu – tai biologinis modelis, mokslininkų manymu, kuris gali būti pritaikytas naudoti roboto „smegenyse“, siekiant efektyviai, mažai energijos ir kliūtis. – vengti judėjimo.
„Kaip važiuoji traukinyje“, – sakė fizikė Elisabetta Chicca iš Groningeno universiteto. „Atrodo, kad šalia esantys medžiai juda greičiau nei toli esantys namai. Vabzdžiai naudojasi šia informacija, kad nuspręstų, kiek toli yra daiktai.
„Iš to išmokstame: jei neturite pakankamai išteklių, galite supaprastinti problemą savo elgesiu“, – pridūrė ji.
Vaisinių muselių smegenyse aplinkinių objektų judėjimas apdorojamas optiniais neuronais T4 ir T5. Padedama Bylefeldo universiteto neurobiologo Martino Egelhaafo, komanda algoritmiškai imitavo šią neuroninę veiklą savo mažose roboto „smegenyse“, suteikdama jiems galimybę apdoroti kryptingą informaciją, kad galėtų efektyviai judėti ir išvengti susidūrimų su bet kokiomis kliūtimis kelyje.
„Dauguma robotikos nėra susijusi su efektyvumu“, – sakė Chicca. „Mes, žmonės, augdami esame linkę išmokti naujų užduočių, o robotikoje tai atsispindi dabartinėje mašininio mokymosi tendencijoje. Tačiau vabzdžiai gali skristi iš karto nuo gimimo. Veiksmingas būdas tai padaryti yra jų smegenyse. “
Galutinis rezultatas – kompaktiškas robotas, turintis vieną pagrindinį tikslą – nukreipti link vietos, kurioje aptiktas mažiausiai judėjimo. Groningeno universiteto Thorbenas Schoepe’as, sukūręs techninę įrangą, išbandė ratuotą robotą ir nustatė, kad jis susicentruotų tarp objektų ir taip pat sumaniai pakoreguotų savo kelią, kad galėtų apeiti kliūtis – kaip tai darytų vabzdys skrendant.
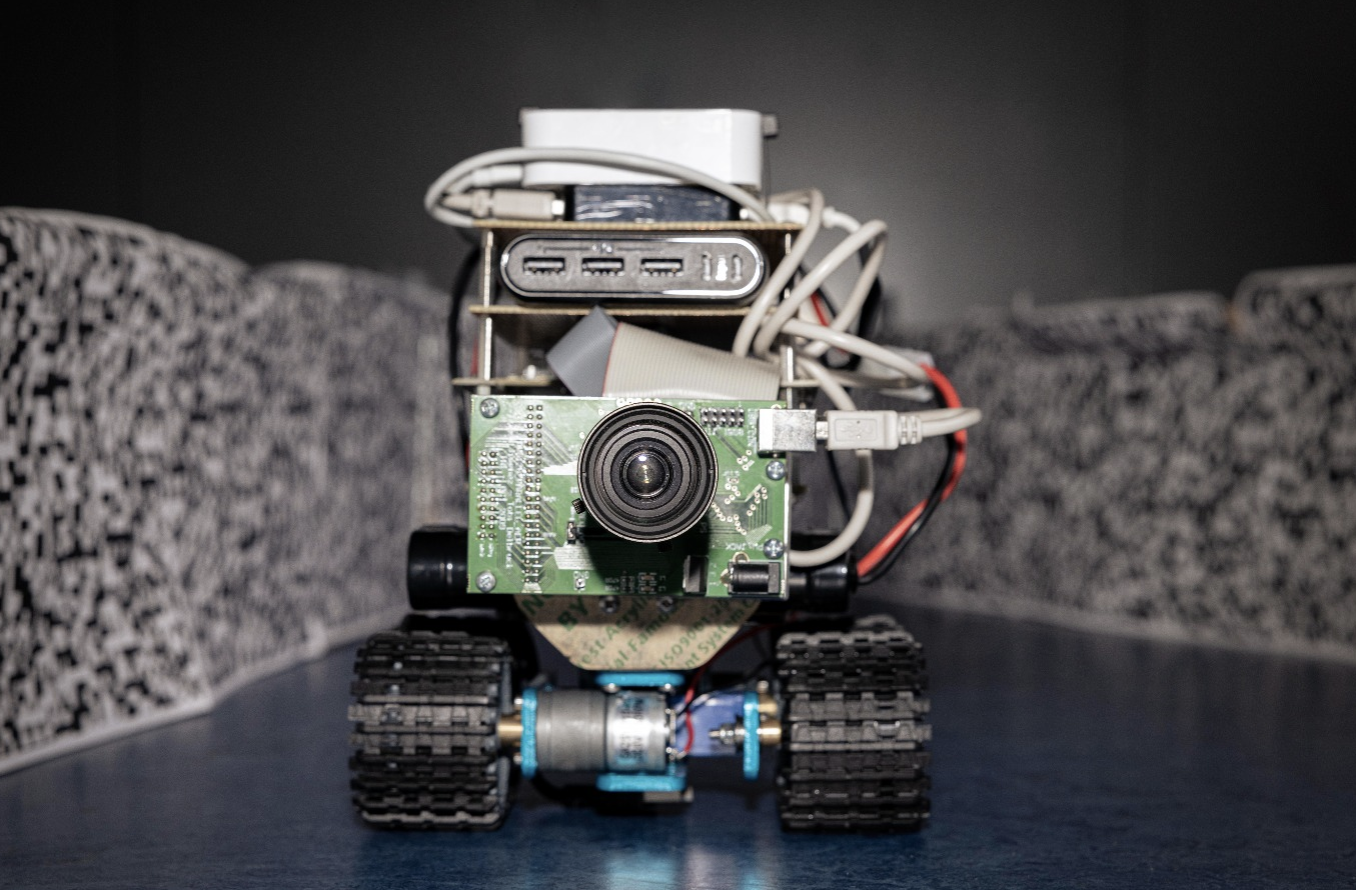
Leoni von Ristok / Groningeno universitetas
„Modelis yra toks geras, – sakė Chicca, – kad kai jį nustatysite, jis veiks įvairiose aplinkose. Tai yra šio rezultato grožis.”
Grupė mano, kad tai yra pirmasis tokio pobūdžio tyrimas, skirtas kliūčių išvengimui, ir tai žengia didžiulį žingsnį į priekį kuriant neuromorfinę aparatinę įrangą robotikoje. Ateityje tokia mašina galėtų būti naudojama naršyti netvarkingoje vietovėje, pvz., nelaimių vietose, naudojant itin mažą energijos išeigą, be to, joje galėtų būti įrengti įvairių tipų jutikliai, atsižvelgiant į naudojimą, pavyzdžiui, radaras, leidžiantis aptikti bestruktūrinius objektus.
„Sukūrėme vabzdžių įkvėptą robotą“, – sakė Chicca. „Jis turi puikių galimybių keliauti tankiu reljefu, išvengti susidūrimų, kirsti tarpus ir pasirinkti saugius praėjimus. Šios galimybės pasiekiamos naudojant neuromorfinį tinklą, nukreipiantį robotą į sritis, kuriose matomas mažas judėjimas. Mūsų sistema panaudoja žinias apie regėjimo apdorojimą ir kliūčių vengimą vabzdžiai“.
Tyrimas buvo paskelbtas žurnale Gamtos komunikacijos.
Šaltinis: Groningeno universitetas