Naujas povandeninis robotas gali plaukti per vandenį su pelekais, o prireikus vaikščioti ar šliaužti dugnu. Dėl šių galimybių jis tikrai gali padėti – tai visiškai numatyta – pranokti savo tradicinius privairavimo įrenginiu varomus kolegas.
Kai reikia atlikti tokias užduotis kaip nuskendusių laivų tyrinėjimas ir panardintų konstrukcijų tikrinimas, dažnai naudojami povandeniniai ROV (nuotoliniu būdu valdomos transporto priemonės).
Kaip ir įgulos povandeniniai laivai, šios transporto priemonės naudoja elektrinius variklius, kad galėtų judėti vandeniu. Deja, šie varikliai gali užsikimšti jūros dumblių, kabančių laidų, išmestų meškerės ar kitų medžiagų. Be to, ROV negali žengti į priekį prieš sroves, kurios teka greičiau nei didžiausias privairavimo greitis.
Štai kur HERO-BLUE turėtų pasirodyti.
Jo pavadinimas yra akronimas, reiškiantis „Pavojingos ir ekstremalios aplinkos RObot biomimetinei multiLocomotion-based Underwater Expedition“, eksperimentinį įrenginį sukūrė Taesik Kimas ir kolegos iš Pietų Korėjos Pohango mokslo ir technologijų universiteto. Tai neabejotinai primena McGill ir Dalhousie universitetų AQUA robotą, kuris plaukioja šešiomis plaukmenimis ir tarsi „plakia“ sausą žemę.
POSTECH
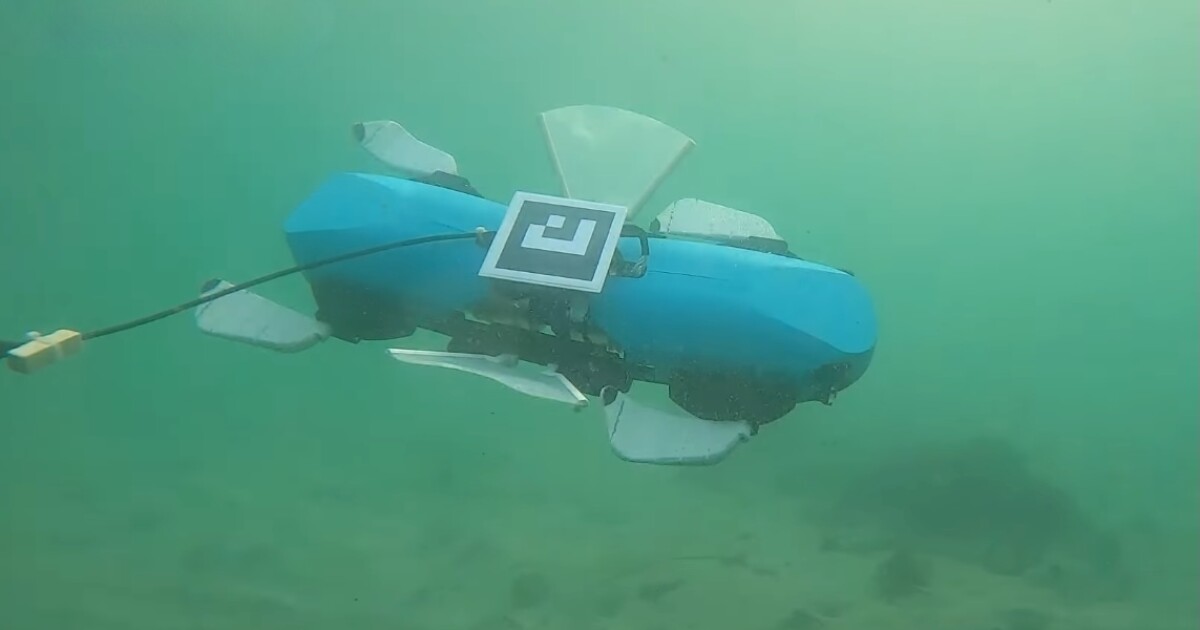
HERO-BLUE korpuse yra keturi multimodaliniai pelekai (du priekyje, du gale) kartu su dviem šoniniais pelekais (po vieną iš abiejų pusių, kūno viduryje).
Kiekvienas multimodalinis pelekas sudarytas iš kelių polimerinių plokščių, sujungtų elastomerinėmis „sausgyslėmis“. Jie sukonstruoti taip, kad pelekas išliks standus, kai jėga veikia viena kryptimi, bet tampa lanksti, kai jėga veikia kita kryptimi.
Kiekvienas šoninis pelekas susideda iš elastomero membranos, pakabintos tarp dviejų standžių „spindulių“ (iš esmės strypų) – po vieną abiejuose membranos galuose.
Kai BLUE plaukia, multimodaliniai pelekai plevėsuoja aukštyn ir žemyn, kaip ir žuvies krūtinės pelekai. Šoniniai pelekai taip pat gali atsispirti, kai reikia atlikti smulkesnius manevrus, judėdami banguotai, kaip ir peilio žuvies apatinis pelekas.
Be to, plaukimas gali būti netinkamas esant stiprioms srovėms. Tokiais atvejais BLUE naudoja integruotus plūdrumo valdiklius, kad nukristų į dugną, o tada savo multimodaliniais pelekais vaikščiotų žvyru, smėliu ar kitu povandeniniu reljefu. Kiekvienas pelekas išlieka standus traukiant roboto kūną į priekį, o tada pasisuka lankstus, kai vėl braukiamas atgal į priekį, kad būtų galima žengti kitą žingsnį.

POSTECH
Plaukimas taip pat neįmanomas labai sekliame vandenyje, todėl BLUE turi salamandros įkvėptą stuburą. Šis stuburas lenkiasi į kairę ir į dešinę ties juosmens sąnariu tarp priekinės ir galinės roboto kūno dalių. Šis išdėstymas leidžia robotui pasukti savo kūną pirmyn ir atgal, svirduliuodamas į priekį net prieš palyginti stiprią srovę.
Dabartinės koncepcijos įrodymo formos MĖLYNA spalva yra 80 cm ilgio, 60 cm pločio ir 30 cm aukščio (31,5 x 23,6 x 11,8 colio), o svarstyklės sveria 11,3 kg (24,9 svaro). Ir nors kol kas jis valdomas nuotoliniu būdu, priekyje yra du kameros moduliai stereoskopiniam matymui, kurie vieną dieną galėtų leisti veikti autonomiškai.
Žemiau esančiame vaizdo įraše galite pamatyti HERO-BLUE plaukimą ir ėjimą dugnu. Straipsnis apie tyrimą neseniai buvo paskelbtas žurnale IEEE operacijos dėl robotų.
(HERO BLUE) T-RO: visas vaizdo įrašas
Šaltinis: IEEE Transactions on Robotics