Mokslininkai sukūrė itin jautrų, į žmogų panašų robotą „pirštą“, galintį saugiai atlikti įprastinius fizinius tyrimus, kaip tai darytų gydytojas. Jie sako, kad „robodoctor“ netrukus bus galima pamatyti medicinos klinikose.
Gydytojų pirštai yra diagnostikos įrankiai, naudojami norint sužinoti įvairius dalykus apie jus ir jūsų sveikatą. Medicinos specialistai pirštus naudoja norėdami, pavyzdžiui, matuoti pulsą, apčiuopti nenormalius gabalėlius po oda esančiuose audiniuose, ir diagnostikos tikslais juos įkiša į gerai, tamsias, šiltas vietas.
Dabar Kinijos mokslo ir technologijos universiteto (USTC) Tiksliųjų mašinų ir tiksliųjų prietaisų katedros mokslininkai sukūrė žmogaus įkvėptą, sulenkiamą robotų „pirštą“, kad būtų galima atlikti įprastinius medicininius patikrinimus, kaip išvardyti aukščiau.
„Fizinė apžiūra yra vienas iš plačiausiai prieinamų, veiksmingiausių ir saugiausių metodų, leidžiančių anksti aptikti gabalėlius ir kitus krūties vėžio požymius“, – sakė mokslininkai. „Tradicinėje kinų medicinoje gydytojai gali išmatuoti paciento pulsą ties riešo… kad suprastų jo ar jos širdies būklę.
„Viena vertus, dėl apmokytų, patyrusių gydytojų trūkumo kai kurios ligos ar galimos rizikos gali būti laiku nenustatytos, kad būtų išvengta paūmėjimo. Kita vertus, didelė dalis asmenų nenori atlikti fizinės apžiūros, ypač tų, kuriuos apžiūri priešingos lyties gydytojas. Taigi, robotų palpacija sulaukė didelio mokslininkų bendruomenės dėmesio.
Atsižvelgiant į žmogaus rankos sudėtingumą, net ir pažangiausios robotų rankos vis dar gerokai atsilieka pagal savo galimybes. Taigi, kad USTC komanda pasiektų panašų į žmogaus lytėjimo jutimą, skirtą palpacijai (tai yra nukrypimų nuo normų jutimas) ir propriorecepcijai – gebėjimui pajusti mūsų kūno dalių judėjimą ir vietą – minkštame roboto piršte yra gana didelis. sandoris.
Wang ir kt.
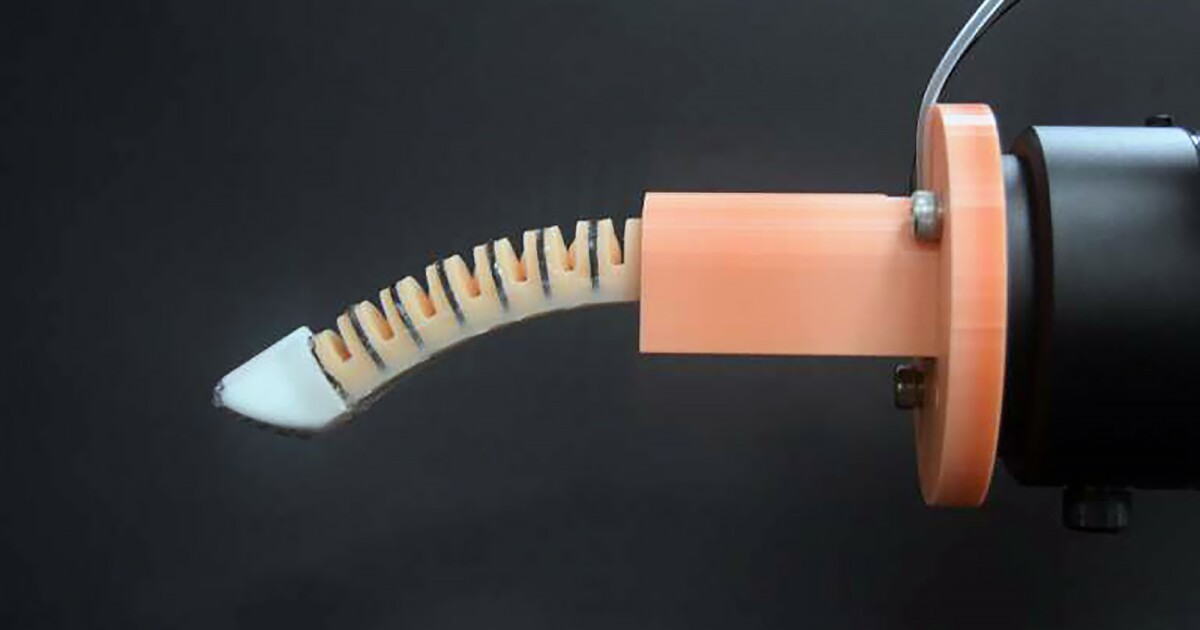
Jų BSF, trumpinys „bioinspired soft finger“, susideda iš lenkimo paleidimo korpuso ir integruoto multimodalinio jutimo. Jis yra piršto formos pusapvalis su PneuNet (pneumatinių tinklų) struktūra, minkštųjų pavarų klasė, sudaryta iš kanalų ir kamerų elastomero viduje. BSF pasilenkia į vidų, kai yra slėgis, kai šios oro kameros plečiasi. Visas jo ilgis yra 129 mm (5,08 colio).
„Siūlomas BSF yra paprasto dizaino ir reikalauja tik išmatuoti varžą ir induktyvumą dviejuose gnybtuose, kad būtų galima suvokti kaip žmogų prisilietimo“, – aiškina mokslininkai. „Kaip ir mūsų žmogaus pirštas, BSF gali suvokti turtingą informaciją apie fizines objektų savybes per aktyvų prisilietimą.
Tyrėjai išbandė, kaip jų BSF sekasi atlikti medicininę palpaciją, kaip tai darytų gydytojas. Jis galėtų ieškoti ir atpažinti modelio gabalėlius tam tikruose modelio audiniuose dideliame plote. Be to, „robofinger“ sėkmingai rado arteriją žmogaus dalyvio rieše ir išmatavo pulsą. Tyrime nebuvo paminėta, ar pirštas buvo naudojamas bet kokio tipo invazinėms prognozėms atlikti.
„Mes parodėme, kad BSF gali spausti ir „jausti“ objekto standumą ir atlikti saugią bei tikslią robotinę palpaciją, panašią į tą, kurią atlieka gydytojas“, – sakė mokslininkai. „Be to, BSD, sumontuotas ant (šešių laisvės laipsnių) roboto rankos, gali nustatyti dalyvio riešo arteriją ir paimti (impulsus) analizei realiuoju laiku. Šios išvados pabrėžia „robodoctor“ galimybes ateityje atlikti fizinius tyrimus.
Bent jau mažai tikėtina, kad BSF susidurs su šaltų rankų problema.
Tyrimas buvo paskelbtas žurnale Ląstelių ataskaitos: fiziniai mokslai.