Nuo pisuarų plovimo iki paplūdimio sutvarkymo – jau dabar matome ateitį, kurioje mūsų robotai padės išlaikyti mūsų pasaulį šiek tiek švaresnį. Dabar roboto ranka įveikė stebėtinai sudėtingą kriauklės plovimo užduotį, parodydama savo gebėjimą mokytis.
Praustuvo valymas gali pasirodyti ne pati sudėtingiausia užduotis, bet kai pagalvoji, tai daug ką nulemia. Turite intuityviai žinoti, kokiu kampu naudoti kempinę, suprasti, kokią jėgą reikia pritaikyti skirtingoms kriauklės dalims, atsižvelgiant į nešvarumus, ir nuolat reguliuoti savo kūną, kai judate paviršiumi. Mums, žmonėms, tai tikrai lengva, bet jei esate programuotojas, dirbantis su tik pradedančiu veikti robotu, koduoti reikia daug.
„Kameromis užfiksuoti geometrinę praustuvo formą yra gana paprasta“, – sako Andreasas Kugis iš TU Wien automatikos ir valdymo instituto Austrijoje. „Tačiau tai nėra esminis žingsnis. Daug sunkiau išmokyti robotą: kokio tipo judėjimas reikalingas kuriai paviršiaus daliai? Kaip greitai turėtų būti judesys? Koks yra tinkamas kampas? Koks yra tinkamas jėgos kiekis? “
Suprasdamas, kad visų tų duomenų taškų ir derinių programavimas yra neįtikėtina užduotis, Kugis ir jo komanda nusprendė leisti savo robotinei rankai išmokti atlikti užduotį stebint, kaip kažkas kitas tai atlieka.
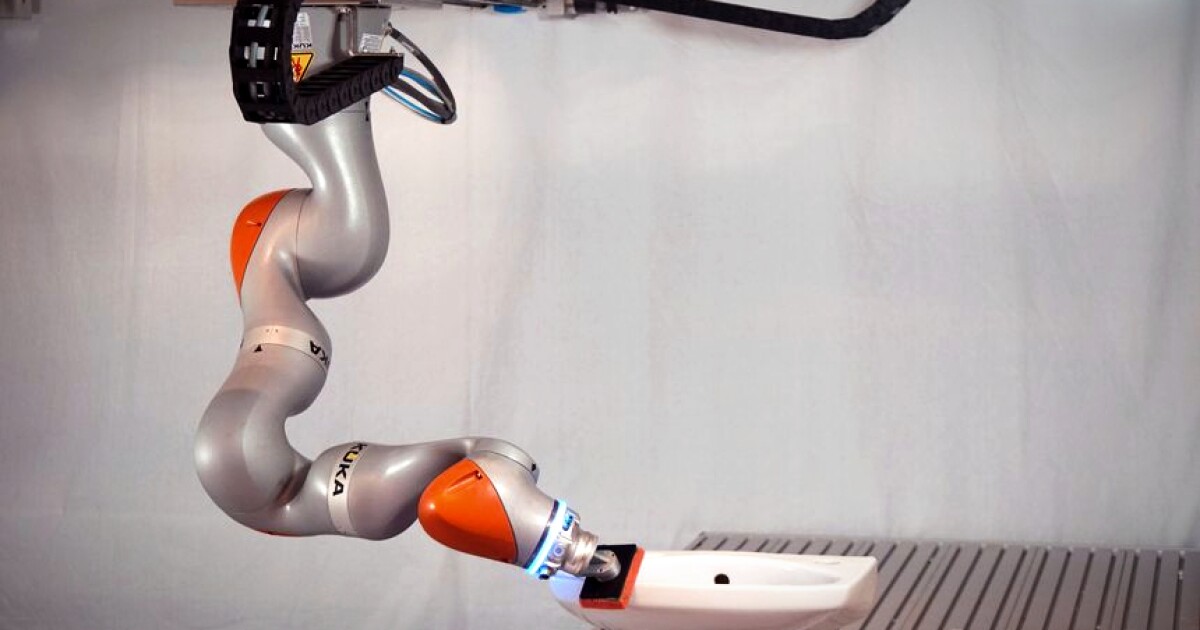
Taigi jie sukūrė specialią valymo kempinę, aprūpintą jėgos ir padėties jutikliais, ir paprašė, kad žmogus jas pakartotinai nuvalytų tik priekinį kriauklės kraštą, kuris buvo apipurkštas dažytu geliu, imituojančiu nešvarumus. Tada jie panaudojo duomenis, surinktus iš šių pratimų, kad išmokytų neuroninį tinklą, kuris galėtų paversti įvestį iš anksto nustatytais judėjimo modeliais. Jie pateikė tuos modelius robotui ir leido informuoti apie jo judesius, kai jis nustato užduotį. Kaip matote kitame vaizdo įraše, treniruotės pavyko gana gerai.
Robotas lernt Waschbeckenputzen
Federuotas mokymasis
Nors eksperimentas buvo sutelktas į kriauklės valymą, mokslininkai teigia, kad tai parodo faktą, kad roboto rankos gali atlikti įvairias užduotis ant skirtingų, skirtingų paviršių, įskaitant šlifavimą, dažymą ar suvirinimą lakštiniu metalu. Be to, jie sako, kad robotų parkas galėtų išmokti vienas iš kito pagrindinių judesių per vadinamąjį „federacinį mokymąsi“, o tada galėtų pritaikyti šiuos judesius savo individualioms, nurodytoms užduotims.
„Įsivaizduokime, kad daugelyje dirbtuvių šie savarankiškai besimokantys robotai šlifuoja arba dažo paviršius“, – sako Kugi. „Tada galėtumėte leisti robotams individualiai įgyti patirties su vietiniais duomenimis. Vis dėlto visi robotai galėtų dalytis išmoktais parametrais vieni su kitais.”
Ar galite pasakyti „singuliarumas“?
Komandos darbą aprašantį dokumentą galima gauti TU Wien. Neseniai jis buvo pateiktas IROS 2024 konferencijai ir buvo apdovanotas „Geriausio paraiškos popieriaus apdovanojimu“, išskiriančiu jį iš daugiau nei 3500 kitų straipsnių.
Šaltinis: TU Wien