
Jei nardytojai naudoja pripučiamus BCD (plūdrumo kontrolės įrenginius), kodėl gi ne povandeninius robotus? Na, eksperimentinis naujas daroir teigiama, kad ši technologija yra daug efektyvesnė energiją nei tradiciniai judėjimo aukštyn ir žemyn vandenyje metodai.
Paprastai povandeniniai ROV (nuotoliniu būdu valdomos transporto priemonės) ir AUV (autonominės povandeninės transporto priemonės) yra suprojektuoti taip, kad būtų neutralūs. Tai reiškia, kad po vandeniu jie nei nugrimzta į dugną, nei išplaukia į paviršių.
Norėdami judėti vertikaliai vandens stulpelyje, jie paprastai naudoja savo galingus elektrinius variklius. Kita galimybė yra naudoti elektrinį siurblį, kad vanduo būtų įtrauktas į balasto rezervuarus ir iš jo. Bet kuriuo atveju proceso metu išeikvojama daug akumuliatoriaus energijos.
Ieškodama veiksmingesnės alternatyvos, Rice universiteto BayMax inžinierių studentų komanda ieškojo grįžtamojo vandens skaidymo kuro elementų. Jie integravo keturis įrenginius į pačių sukurtą ROV, vadinamą Monarchu.
Vandenį skaidančiuose kuro elementuose naudojamas elektrolizės procesas, kad skystas vanduo padalijamas į du komponentus – vandenilio ir deguonies dujas. Grįžtamieji elementai, kaip rodo jų pavadinimas, taip pat gali paversti dvi dujas atgal į skysčius. Kadangi dujų tankis yra mažesnis nei skysčio, jų tūris yra didesnis.
Šiuo reiškiniu išnaudoja monarchas.
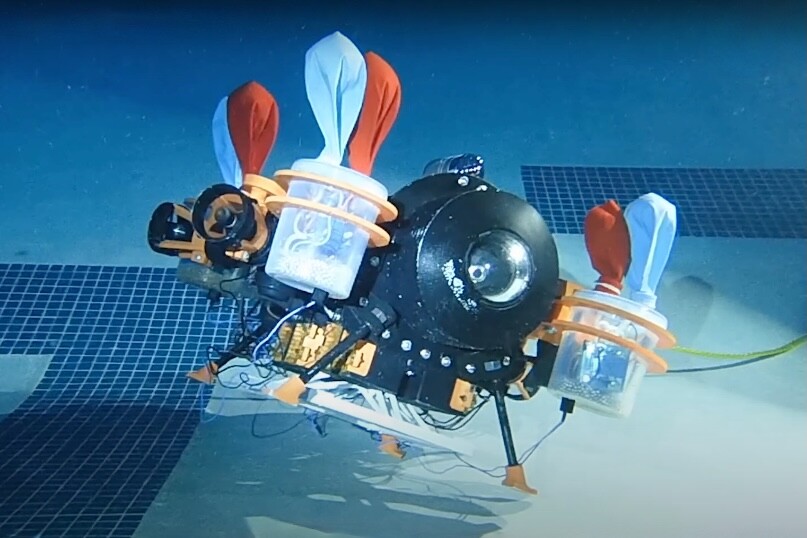
Jeff Fitlow / Rice universitetas
Jei ROV reikia padidinti plūdrumą, distiliuotas skystas vanduo kuro elementuose paverčiamas vandenilio ir deguonies dujomis, kurios pripučia balionus, esančius kiekvienos ląstelės viršuje. Kai transporto priemonei reikia sumažinti plūdrumą, šios dujos vėl paverčiamos skysčiais, todėl balionai ištuštėja.
Šią technologiją galima papildomai panaudoti, kad laivas sėdėtų horizontaliai vandenyje, prireikus automatiškai aktyvuojant atskiras ląsteles. Be to, kadangi net „neutraliai“ plūduriuojančių ROV ir AUV plūdrumas kinta skirtingame gylyje arba gėlame vandenyje, palyginti su sūriu vandeniu, sistemą galima nustatyti taip, kad ji išlaikytų transporto priemonę bet kuriame gylyje.
Nors elektrolizės procesas naudoja kai kurie elektros energijos, jai reikia daug mažiau, nei reikėtų, kad pakiltų arba nukristų naudojant privairavimo jėgaines. Kuro elementų pagaminta elektra netgi galėtų būti naudojama ROV maitinimui.
Tiesą sakant, 2023 m. dokumente, kuris įkvėpė BayMax komandą sukurti monarchą, mokslininkai iš Rice universiteto ir Hiustono universiteto teigė, kad kuro elementų gylio valdymas gali sumažinti AUV energijos sąnaudas iki 85%, palyginti su tradiciniai varikliai.
Be to, teigiama, kad kuro elementai yra lengvesni ir pigesni nei vertikalūs varikliai. Jie taip pat yra daug tylesni, todėl mažiau tikėtina, kad jie išgąsdins povandeninę gamtą.
Jeff Fitlow / Rice universitetas
Nereikia nė sakyti, kad realiame pasaulyje vietoj guminių balionų gali būti naudojamos žymiai stipresnės pūslės. Pagrindinę technologiją galima būtų panaudoti ir ne vandens reikmėms, pavyzdžiui, pagalbiniams dėvimiems prietaisams ar robotams skirtuose drabužiuose.
„Mums šaunus dalykas yra tai, kad tai technologija, kuri yra tikrai pažangiausia, tai kažkas, kas anksčiau nebuvo padaryta tiksliai taip, kaip mes tai darome“, – sako „BayMax“ narys Andrew Bare’as. „Esame pirmieji, įdiegę šią technologiją įrenginyje su žingsniu ir plačiais valdikliais, todėl tuo labai džiaugiamės.
Žemiau esančiame vaizdo įraše galite pamatyti monarcho veikimą.
Projektas yra bendradarbiavimo projekto tarp Rice universiteto profesorių Fathi Ghorbel ir Lauros Schaefer bei Hiustono universiteto prof. Zheng Chen laboratorijų dalis.
Povandeninis robotas yra naujos energiją taupančios plūdrumo kontrolės pionieriai
Šaltinis: Ryžių universitetas