Nelaimių vietos skiriasi taip pat, kaip ir gelbėjimo misijos. Norint padėti naudoti robotiką, dažnai reikia kelių robotų, kurie apžiūrėtų, liptų, keltų ar manipuliuotų objektus. Athena sujungia visas šias galimybes vienoje, tvirtoje, autonominėje platformoje, sukurtoje paieškai ir gelbėjimui.
Pirmasis dokumentuotas robotų panaudojimas reaguojant į nelaimes datuojamas 1986 m., kai Černobylyje buvo dislokuotos mašinos, padedančios radiacijos žvalgybai ir valymui. Per pastaruosius dešimtmečius robotai pasirodė daugybėje kitų scenarijų, kai pirmiausia išsiųsti žmogų buvo tiesiog per daug pavojinga. Jie taip pat buvo dislokuoti kartu su gelbėtojais, renkant duomenis, vykdant stebėjimą ir, kai kuriais atvejais, padedant.
Problema ta, kad nėra dviejų vienodų nelaimių vietų. Todėl nė viena paieškos ir gelbėjimo misija nėra identiška. Kai kuriems gali tekti lipti laiptais ir rinkti duomenis realiuoju laiku, o kitiems gali tekti šliaužti per griuvėsius ir atidaryti skląsčius. Todėl labai specifinėms užduotims atlikti sukurti robotai gali staiga tapti nenaudingi, kai prireikia kitų užduočių.
Clay Gilliland/CC 2.0
Skraidantys robotai yra greiti ir puikiai tinka dideliems plotams tyrinėti, tačiau jiems sunku neštis sunkius įrankius ar sąveikauti su aplinka. Kojų robotai gali įveikti sudėtingą reljefą, tačiau dažnai jų naudingoji apkrova ir stabilumas yra ribotos. Kita vertus, vikšriniai robotai yra stiprūs ir stabilūs, tačiau linkę paaukoti judrumą. Galite dislokuoti kelis robotus, bet dėl to kyla įvairių problemų.
Siekdami išspręsti šiuos iššūkius, Vokietijos Darmštato technikos universiteto SIM grupės mokslininkai sukūrė autonominį, tvirtą ir modulinį paieškos ir gelbėjimo robotą, sukurtą ant atviros aparatinės įrangos. Užuot pernelyg specializuotas, robotas sujungia kelias galimybes į vieną pritaikomą platformą.

Stefanas Fabianas
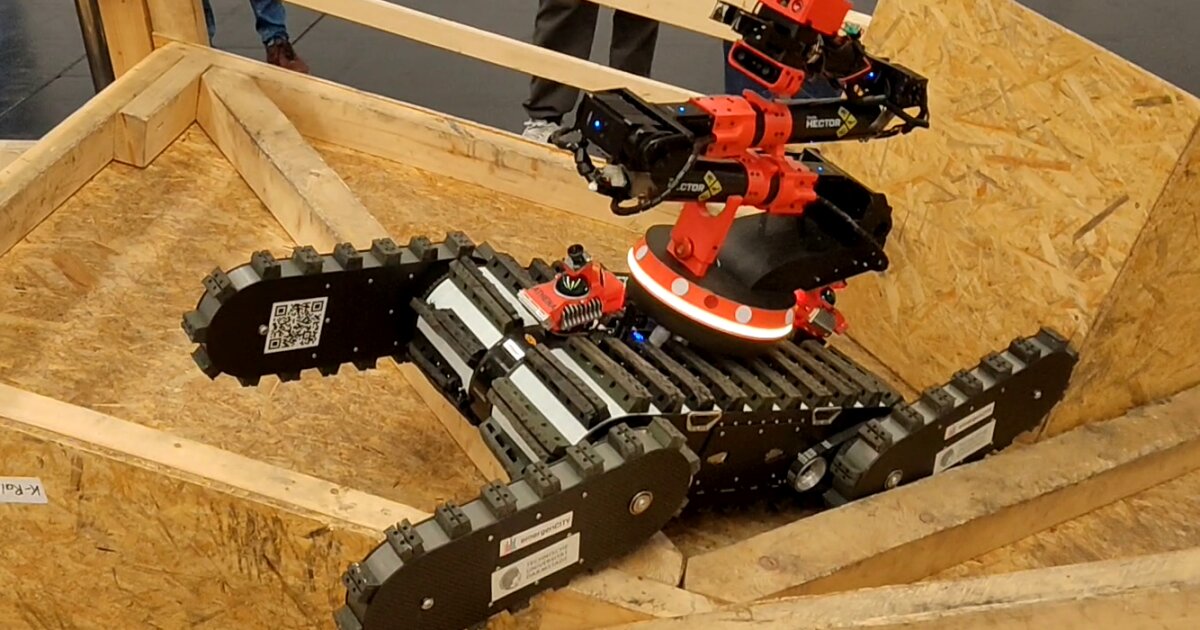
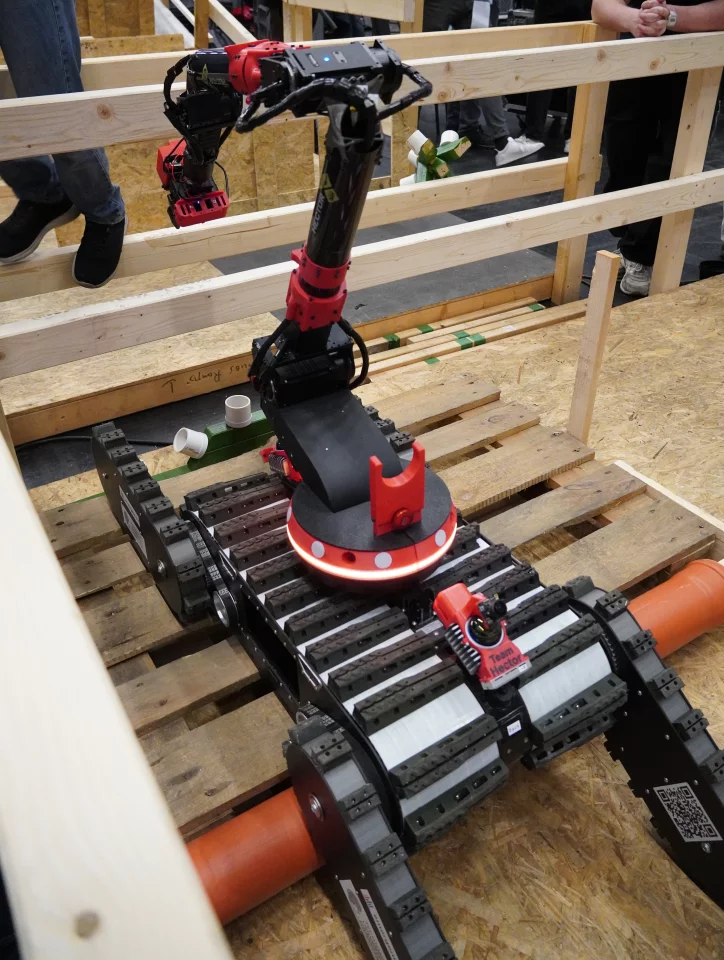
Jis visų pirma naudoja takelius, kad galėtų naršyti įvairių tipų reljefe. Tačiau skirtingai nuo įprastų vikšrinių robotų, kurių pėdsakas yra gana tvirtas, Athena vikšrai yra pritvirtinti prie keturių nepriklausomai valdomų svirties. Ant plokščių paviršių rankos lieka suspaustos, o robotas juda kaip įprastas vikšrinis robotas. Tačiau kiekviena ranka gali pasisukti ir pakeisti savo padėtį, todėl robotas gali iš naujo sukonfigūruoti savo bendrą formą, reaguodamas į reljefą.
Pavyzdžiui, kai Atėnė atsitrenkia į laiptelį ar kliūtį, priekiniai plaukeliai išsitiesia į priekį ir aukštyn, užsikabindami ant atbrailos, prieš patraukdami į viršų likusią roboto dalį ir ją stabilizuodami.
„Keturios individualiai perkonfigūruojamos plevelės žymiai pagerina prisitaikymą prie reljefo, palyginti su ankstesniu dizainu, kai priekis ir galas buvo sujungti“, – aiškina Stefanas Fabianas, tyrimo grupės „eurmanCITY“ tyrimo grupės narys.
Visiškai išskleistas robotas užauga nuo 28 iki 50 colių (711–1 270 mm) ilgio, o tai yra didelis pasiekiamumas 110 svarų (50 kg) mašinai, kuri susilanksto iki pakankamai mažo dydžio, kad tilptų į oro linijų bagažą. Bandymų metu Athena sugebėjo pakelti laiptelius iki 16 colių (406 mm) aukščio ir lipti laiptais, pasvirusiais iki 45 laipsnių. Kalbant apie kontekstą, standartinis laiptų aukštis JAV yra apie 7,5 colio (191 mm).
Stefanas Fabianas
Nustatėme, kad „Athena“ yra užrakinta navigacija, tačiau tai tik viena galvosūkio dalis nelaimių scenarijuose. Kitas svarbus aspektas yra manipuliavimas. Robotams gali tekti atidaryti duris, pasukti vožtuvus, paspausti mygtukus ar paimti daiktus. Atėnė tai pasiekia ištiesiama ranka.
Roboto centre sumontuota septynių jungčių roboto ranka, kurios pasiekiamumas viršija 59 colius (150 cm). Dėl septynių besisukančių jungčių ranka yra kinematinė perteklinė, o tai reiškia, kad yra keli būdai padėti ranką, kad būtų pasiekta ta pati galutinio efekto poza. Praktiškai tai suteikia sistemai daugiau lankstumo apeiti kliūtis ir pasiekti tikslą.
Ranka gali pakelti 16 svarų (7,25 kg), kai ji yra arti pagrindo, ir 6,4 svaro (2,9 kg), kai ji visiškai ištiesta. Jis skirtas atidaryti duris, valdyti vožtuvus, spausti mygtukus ir rinkti mėginius. Kai jis nenaudojamas, jis susilanksto ir magnetiškai užsifiksuoja ant tam skirto porankio, kad sumažintų vizualinį pėdsaką ir apsaugotų jį agresyvaus vairavimo metu. Rankenos gale yra griebtuvas, galintis pritaikyti iki 170 niutonų (38 svarų jėgų) sugriebimo jėgą. Prie riešo esantis jėgos ir sukimo momento jutiklis leidžia rankai aptikti fizinį pasipriešinimą ir reaguoti į jį.
Be navigacijos ir manipuliavimo, Atėnuose yra jutiklių rinkinys, leidžiantis matyti praktiškai viską. Šiame rinkinyje yra RGB-D gylio kamera, šiluminė kamera, plataus kampo RGB kamera, didelės galios šviesos diodas ir LiDAR.

Stefanas Fabianas
Visos sistemos smegenys yra integruotas kompiuteris. Tačiau užduotys, reikalaujančios daug GPU, perkeliamos į išorinį procesorių. Du kompiuteriai bendrauja vidiniu 2,5 Gbit tinklu, o TP-Link lauko prieigos taškas suteikia belaidį ryšį su nuotoliniu operatoriumi. Visas krūvas veikia poroje LiPo baterijų dėžučių. Robotas taip pat gali veikti tiesiogiai iš išorinio 24 V maitinimo šaltinio, kai reikia ilgesnio dislokavimo ir yra įmanoma kabelio jungtis.
Vienas iš mažiau žavingų, bet kritinių „Athena“ dizaino aspektų yra avarinio stabdymo sistema. Kai 110 svarų sveriantis aparatas su galinga rankena pradeda elgtis netikėtai, turite sugebėti nedelsiant ir be jokių abejonių atjungti elektros energiją. „Athena“ komanda pagal užsakymą sukūrė savo avarinio sustabdymo sistemą, kuri gali beveik akimirksniu nutraukti roboto maitinimą naudojant fizinius valdiklius arba belaidį nuotolinio valdymo pultą. Jei ryšys nutrūksta, sistema automatiškai išsijungia kaip saugi.
Dabar Athena robotas nėra nei pirmasis, nei vienintelis tokio pobūdžio. Tačiau tai, kas daro jį ypatingą, yra unikalus įspūdingų savybių derinys. Ne kasdien matote akumuliatorių maitinamą autonominį robotą, kuris gali lipti per šiukšles, stabilizuoti save naudodamas plaukmenis, ištiesti galingą ranką į uždarą erdvę ir atsargiai pasukti vožtuvą, tuo pat metu nuskaitydamas aplinką daugybe pažangių jutiklių. Nepamirškite, kad visa tai gali tilpti į lagaminą. Įdomu tai, kad ši savybė komandai buvo neginčijama.
„Važiuoklė turi tilpti į standartinį bagažą. Turime važinėti į tarptautines varžybas, kad išbandytume savo sprendimų tvirtumą, o roboto transportavimas yra gana brangus. Galėdami išardyti robotą ir gabenti jį kaip registruotą bagažą, sutaupome nemažai pinigų ir laiko”, – sako Fabianas.
Nepaisant visų šių savybių, be jokios techninės specifikacijos, bene išskirtiniausias „Athena“ dalykas yra komandos filosofija. Dauguma pažangių robotų platformų yra uždaros sistemos. Jie yra brangūs, patentuoti ir sunkiai modifikuojami. Mokslininkams tai sukuria kliūtis ir žymiai sulėtina pažangą. „Athena“ komanda pasirinko priešingą požiūrį ir padarė visą sistemą atvirą.
„Sukurti lengvą, bet galingą robotą su pažangiu energijos valdymu ir galingu skaičiavimu nuo nulio yra nepaprastai sudėtinga užduotis, todėl tikimės, kad naudojant atvirojo šaltinio visą dizainą ir dalijantis įgytomis pamokomis, kitoms grupėms, kurioms reikia pritaikytos platformos tyrimams, nereikia pradėti nuo pirmos vietos“, – teigia Fabianas.
Visi CAD failai, PCB dizainai ir žemo lygio programinė įranga yra viešai prieinami „GitHub“. Turėdami tokį prieinamumo lygį, būtinai pamatysime atnaujintas, modifikuotas Athena versijas. Juo labiau paieškos ir gelbėjimo robotikai!
Straipsnis, kuriame išsamiai aprašoma Athena platforma, buvo pristatytas 2025 m. IEEE tarptautiniame saugos, saugumo ir gelbėjimo robotų simpoziume (SSRR) ir paskelbtas m. IEEE „Explore“..
Nuoroda į informacijos šaltinį