Nors robotai nuolat tobulėja, jie nebūtinai žinomi dėl švelnaus prisilietimo. Nauja MIT ir Stanfordo robotų sistema tai unikaliai keičia – robotas, kuris pakelia vynmedžius primenančias ūseliais.
Inžinierių sukurta sistema susideda iš daugybės pneumatinių vamzdžių, kurie išsiskleidžia iš slėginės dėžės vienoje roboto rankos pusėje, naudoja oro slėgį, kad slystų po konkrečiu objektu arba aplink jį, tada vėl sujungiama ranka kitoje pusėje, kur jie yra prispausti. Suspaudus, pati ranka gali judėti arba vamzdis gali būti suvyniotas, kad pakeltumėte arba pasuktumėte jo griebtą objektą. Galimybė dislokuoti vamzdžius ir vėl juos surinkti yra tikras laimėjimas, patobulintas, palyginti su ankstesniais vynmedžių robotais, leidžiant sistemai uždaryti savo kilpas.
Tony Pulsone, MechE
„Žmonės gali manyti, kad norėdami ką nors patraukti, tiesiog ištieskite ranką ir patraukite“, – sako tyrimo bendraautorius Kentaro Barhydtas iš MIT Mechanikos inžinerijos katedros. „Tačiau yra skirtingų etapų, tokių kaip padėties nustatymas ir laikymas. Keisdami atvirą ir uždarą kilpą, galime pasiekti naujų našumo lygių, panaudodami abiejų formų pranašumus atitinkamose stadijose.”
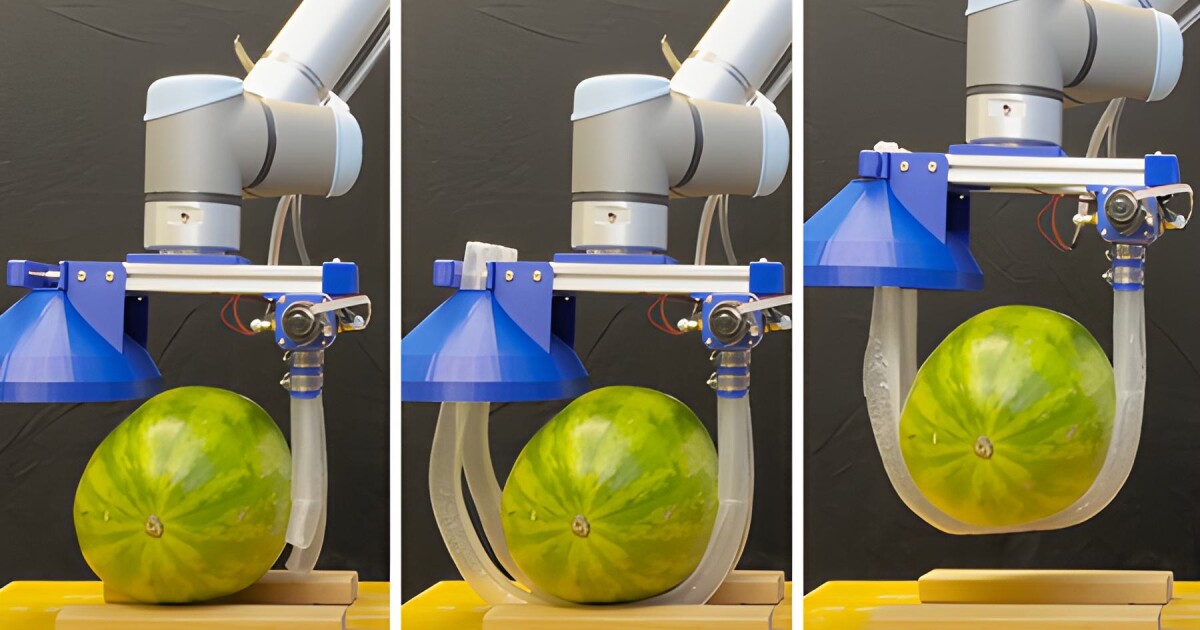
Atlikdami bandymus, kuriuos galite pamatyti kitame vaizdo įraše, komanda parodė, kad sistema gali pakelti apvalius objektus (0:18); objektai netvarkingoje aplinkoje (3:15); trapūs daiktai kaip stiklinė vaza (3:56), dideli daiktai kaip šiukšliadėžė iš toli (4:20); objektų grupė kaip metalinių strypų pluoštas (5:16); ir gana sunkus ir keistos formos objektas, pavyzdžiui, arbūzas (10:50). Nors visa tai įspūdinga, mokslininkai teigia, kad tikrasis jų vynmedžių roboto pažadas yra padėti pakelti žmonių kūnus ligoninėse ir pagyvenusių žmonių priežiūros įstaigose (kurią galite pamatyti 7:30).
Kilpų uždarymo griebimas: topologinės transformacijos leidžia tvirtai, švelniai ir įvairiapusiškai sugriebti
„Asmens iškėlimas iš lovos yra viena iš fiziškai sunkiausių užduočių, kurias atlieka globėjas“, – sako Barhydtas. „Toks robotas gali padėti atleisti slaugytoją, būti švelnesnis ir patogesnis pacientui.
Šiandien labiausiai paplitęs pacientų perkėlimo būdas yra pasukti žmogų į abi puses, kad po jais atsirastų hamaką primenantis paklodė, kuris vėliau pakeliamas gerve. Tai gali sukelti skausmą kai kuriems pacientams ir trikdyti intravenines linijas bei kitus su sveikata susijusius duomenis. Kadangi vamzdeliai gali tilpti per labai ankštas erdves, pavyzdžiui, po paciento kūnu, roboto vynmedžių sistema gali padaryti perkėlimus švelnesnius ir mažiau erzinančius.
„Labai džiaugiuosi būsimu darbu, naudodamas tokius robotus, kad fiziškai padėtų žmonėms, turintiems judėjimo problemų“, – priduria bendraautorė Allison Okamura iš Stamfordo. „Minkšti robotai gali būti gana saugūs, nebrangūs ir optimaliai suprojektuoti konkretiems žmogaus poreikiams, priešingai nei kiti metodai, tokie kaip humanoidiniai robotai.”
Nors mokslininkai pirmiausia buvo motyvuoti sukurti į vynuogyną panašų robotą, kuris padėtų medicininėse situacijose, jie teigia, kad jis taip pat pritaikomas ir kitose srityse, kaip rodo jų bandymų tempai.
„Manome, kad toks roboto dizainas gali būti pritaikytas daugeliui programų“, – sako Barhydtas. „Taip pat galvojame apie tai pritaikymą sunkiajai pramonei ir tokiems dalykams kaip kranų darbo automatizavimas uostuose ir sandėliuose.
Išradimas buvo aprašytas žurnale paskelbtame tyrime Mokslo pažanga.
Šaltinis: MIT
Nuoroda į informacijos šaltinį